Before we go on to explore robot design, it is important to understand why we need the very technology in this first place and how does it revolutionize different scenarios that we commonly come across.
To some of you, robotics may seem like a fantasy, but it’s been around us for decades. However, its usage and importance have grown significantly in the last 10 years, mainly because every industry and individual seek automation. See, it is very important to understand that robots are not only meant to fascinate the general public, perform stunts in the street or walk and talk. In fact, robots can be programmed to perform ANY task that even a human cannot do (e.g. high precision cutting).
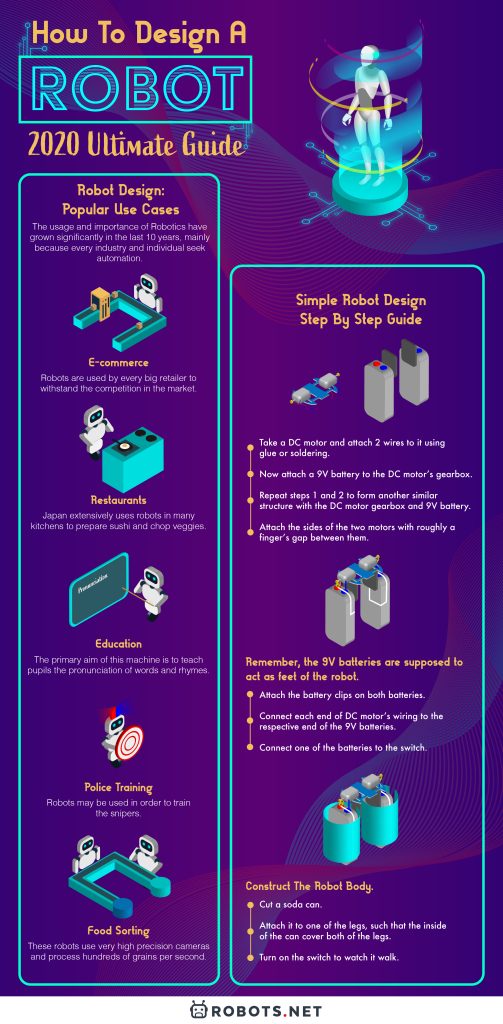
Robot Design: Popular Use Cases

In the early days of robotics, these machines were only confined to a handful of industries. But nowadays, their application is way more diverse. Whether you are a tech professional, a housewife, a teenager or someone living in an old home, you are surrounded by robots pretty much all the time!
E-commerce
When you place an order online, have you ever thought about how you receive the package? I mean there are hundreds of people ordering from Amazon every day, so how do they keep up with the same efficiency level every time?
The credit goes to robots that are deployed at their warehouse for receiving your order, going to the particular shelf to bring your product on the desk before dispatching. So even if not fully, half of Amazon’s operations are dependent on robots.
Please note that I have talked about Amazon just for a reference. Other than that, robots are used by every big retailer – because if they don’t, they can’t withstand the competition and will be out of business in a matter of days, if not weeks.
Restaurants
You might have seen robots in a Sci-Fi film, but this situation is a reality now as Japan extensively uses high-precision robots in many kitchens to prepare sushi and chop veggies. Moreover, in several restaurants, they are also used to take orders at the counter, wipe the tables, act as waiters and prepare an entire menu as well.
It is not only fascinating but manufacturers also claim that the use of robots in restaurants can raise the earnings by about 20%.
Education
Kids are often exposed to robots. Pretty much every toy incorporates at least one robotic function and you didn’t even know that until now – or did you?
Apart from that, an elementary school in San Diego now uses a robot as a Teacher’s Assistant. The primary aim of this machine is to teach pupils the pronunciation of words and rhymes. It does not only cut the operational cost for the school but plays a vital role in improving the spelling and pronunciation of students since a robot can never misspell or mispronounce – it just doesn’t know how to make an error!
Police Training
In some police departments, robots may be used in order to train the snipers. They simulate the behavior of real people (robbers or abductors) and can definitely move around. The job of the trainee sniper is to shot down the robot just as he would do in a real situation.
Of course, these robots are armor-plated!
Food Sorting
We all have consumed rice and in our plates, all grains look pretty much the same. But the question is – do all rice grains grow up to be the same in appearance? Certainly not.
Well, after the crop is harvested, it is brought to the industry where a robot is tasked with separating each grain and deciding whether it can go straight to the bag or it must undergo a corrective treatment (let’s say color) before being packaged.
These robots use very high precision cameras and process hundreds of grains per second!
Multi-purpose Robot Design for Home or Office Use

To be exact, this robot is called Spykee. It can be used in a limited environment as it is controlled via the Internet. The usage totally depends on the will of the user, but it can watch, hear, speak and monitor an environment.
In many cases, people use Spykee for surveillance when they are not at home.
Simple Robot Design Step By Step Guide

Sounds fascinating? Well, it is!
Before you read the steps, please note that it is just a DIY robot. Of course, you cannot sell it in the market, but it is pretty good for fun and adventure.
NOTE: Just for your ease, the following steps (for designing a walking robot) do not contain any microcontrollers and therefore, there is no programming involved.
- Take a DC motor and attach 2 wires to it using glue or soldering.
- Now attach a 9V battery to the DC motor’s gearbox.
- Repeat steps 1 and 2 to form another similar structure with the DC motor gearbox and 9V battery.
- Attach the sides of the two motors with roughly a finger’s gap between them.
Remember, the 9V batteries are supposed to act as feet of the robot.
- Attach the battery clips on both batteries
- Connect each end of DC motor’s wiring to the respective end of the 9V batteries
- Connect one of the batteries to the switch
Construct The Robot Body
With that step, the body of the electrical configuration of your robot is ready. Let’s move towards adding the body.
- Cut a soda can.
- Attach it to one of the legs, such that the inside of the can cover both of the legs.
- Turn on the switch to watch it walk.