





Robots, especially military robots, can be designed to carry out unsafe, murky, or recurring tasks with constant precision and regular accuracy. Therefore, it is not hard to see why more and more industries are beginning to adopt robots for different applications. This is due to their usefulness. There are different types of robots. They vary in their uses, applications, and features. These come in diverse models or types and have different features such as the distance it can cover, the amount of payload it can accommodate, and how many axes their jointed arm contains. These are the main differences in the features of robots.
Military robots can work round the clock. They don’t get tired or go for breaks like human workers. Also, because robots are lifeless technologies, they can easily perform hazardous tasks that are otherwise challenging and unsafe for their human counterparts. The use of robotic technology equally boosts productivity and enhances profitability. At the same time, it can eliminate labor-intensive tasks that could pose some threats to their physical well-being and result in accidents or injury.
Benefits Of Robotics
Overall, robotics technology is finding its way into more industries today because:
1. They produce an accurate and more precise result.
2. They are flexible and can perform multiple roles.
3. They are comparatively cheaper compared to hiring human labor.
4. They are less noisy.
5. They boost work speed by roughly 50 percent.
Robotics has transformed the world in two stages. The first generation of robots performs repetitive and boring tasks in the industry. These groups of robots have extensive application in car manufacturing and assembly. The second phase of this robotic revolution produces robots that not only takes up simple recurring tasks but equally assimilate information and react to fresh information. Since not yet widely utilized, this second generation of robots is gradually dispersing from the automotive industry to other industries.
What Are Military Robots?
The robotic revolution is more evident in public safety and defense industry. The development of drones has revolutionized the industry. Presently, military robots help to carry out an investigation, provide support in the war front, and perform patrol tasks.
They equally have applications in public safety where drones are currently serving as the primary responders during accident incidents. Drones are useful in analyzing the situation of things in the accident scene real-time. Also, their uses include observing other types of accidents. Remote-controlled drones also have uses in the military for defense purposes.
Military robots have transformed how the military and public safety industry conducts their analysis and engage in surveillance activities. The use of automated machines to carry heavy weapons may make you nervous. However, these robots can potentially minimize the loss of life. Also, they can make it easier for soldiers to securely spy locations or breach enemy targets. The structures of a lot of military robots are for supporting life instead of eliminating life.
Benefits Of Military Robots
Robot army saves and preserves the lives of soldiers who may be killed by replacing the serving soldiers. Robot soldier doesn’t get tired. They don’t sleep or hide away from the weather elements. Moreover, they don’t while away the time by communicating with friends. The best of it all is that battle robots don’t have passion or emotion. This helps greatly to minimize the incidences of unethical behavior of soldiers during combat. Thus, the tiredness, strain, sentiment, and related feelings that affect the integrity of the soldier’s decisions are significantly minimized.
Types Of Military Robots
You’d be surprised to know that the history of war robots weapons utilized in military combat dates back to 1930s when the Soviet Union used it with their so-called teletanks. While the operator stayed in a different tank roughly 1, 500 meters at the back of the teletank, he operated the tank through radio signals. Also, during the Second World War, Germany made use of battle robots known as “Goliath” to track mines. Since then, due to technological advancements, armies use these types of robots to improve continuously and get better day after day. And today, we have different types of military robots with different uses.
Military Transportation Robots
These robotic soldiers perform transportation roles. They can help the soldiers in the transportation of bombs, artillery, military supplies, and other materials. Although these military robots commonly have wheels, some of them come with legs instead of performing on rough terrains.
Military robots used for transportation boost logistics efficiency and equally assist soldiers in their movements. They help to soldiers to carry materials to the battlefield. Also, they equally help to pick up causalities from the battlefield.
The soldiers who undertake risky combats receive payments for their task. However, they are still human and deserve to live, and so the use of robotics army in different tasks can be life-saving. Some of the life threats will be avoidable through using robotics army. At the same time, they can help in improving the transport system.
For instance, robots would be handy for extracting casualties from the battlefield. They could equally improve the transportation system like the Autonomous Platform Demonstrator or APD. APD is a military transportation robot that the United States Army Tank-Automotive Research designed.

Search And Rescue Military Robots
The use of these types of military robots is for search and rescue missions. A robot army can be of big help in search and rescue mission inside water and wilderness. They equally come handy when there are floods, wildfires, and wreckages during an earthquake.
Robot soldiers can also help in rescue missions during some incidents like tsunamis, tremors, and artificial disasters like the Chernobyl or 9/11 incident.

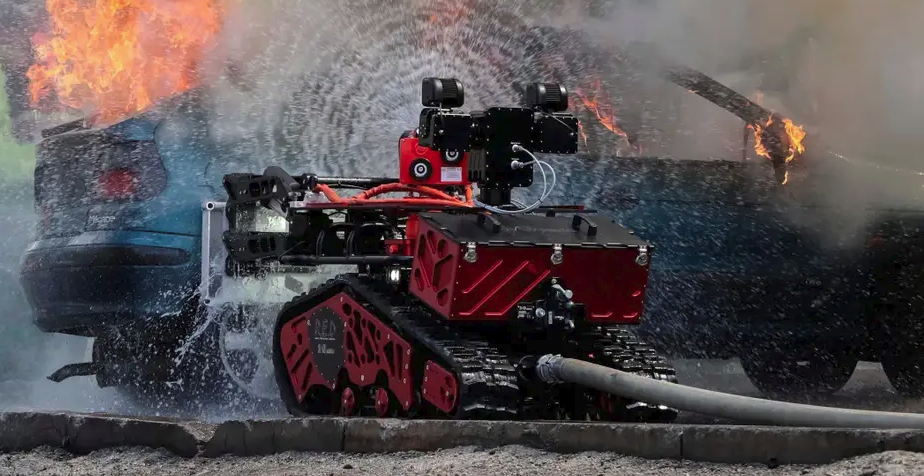
Fire Fighting Military Robots
This type of robot soldiers can be of great use when there is fire. It can help to save the human soldier from life threat. The firefighting military robots are the type of robots that can be linked up with a hydrant to help in extinguishing the fire. They can save the lives of victims and also the lives of firefighters. These types of robotics army that assist firefighters are not yet common. However, some robot army at present is for such purposes. Some of these types of robot soldier help to investigate the situation in a fire site. There are equally some gigantic remote-controlled fire extinguishers.
Mine Clearance Military Robots
This type of battle robots is useful in very risky situations that can cost human lives. There are many war robots weapons utilized around the world today. They are commonly remote-controlled. Also, the operator is from a far distance to ensure his safety.
Surveillance And Reconnaissance Military Robots
These robotic soldiers are essential in spying the enemy. Many military robots are useful in surveillance and investigative missions. Future robots for surveillance and investigation will also have weapons.
Armed Military Robots
These are types of military robots have weapons to shoot people.
Unmanned Aerial Vehicle (UAV) Robots
These battle robots are flying robots designed for investigative missions. Also, their use is for surveillance missions. Future robots may include unmanned fighters and bombers.
Unmanned Ground Vehicles (UGV) Robots
The majority of the military robot types that we have discussed are UGVs. These robots are robots that operate on the ground.
Unmanned Underwater Vehicle (UUV) Robots
These robotic soldiers can swim underwater.
The uses of some types of army robots can be for surveillance purposes and equally for search and rescue missions. Similarly, the classification of the last types of military robots is according to the environment where they operate. They can work as military robots for rescue, surveillance, and mine clearance.
Military Robots Can Be Protectors Too
There you have it! The fantastic roles that military robots are playing in the army and how robotic soldiers can be integrated into defense and security system to boost protection, enhance the protection of lives, and improve efficiency while minimizing costs.
















